Argoverse
Public datasets supported by detailed maps to train and test methods for perception and prediction in driving scenes.

Public datasets supported by detailed maps to train and test methods for perception and prediction in driving scenes.
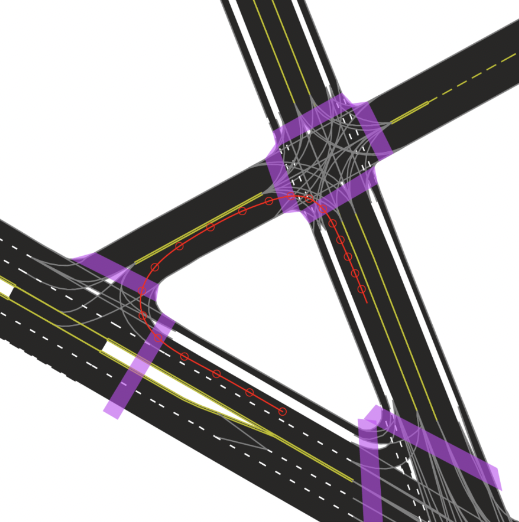
Argoverse maps include geometric and semantic metadata, such as lane boundaries and driveable area. These details make it possible to develop more accurate perception algorithms, which in turn will enable self-driving vehicles to safely navigate complex city streets.



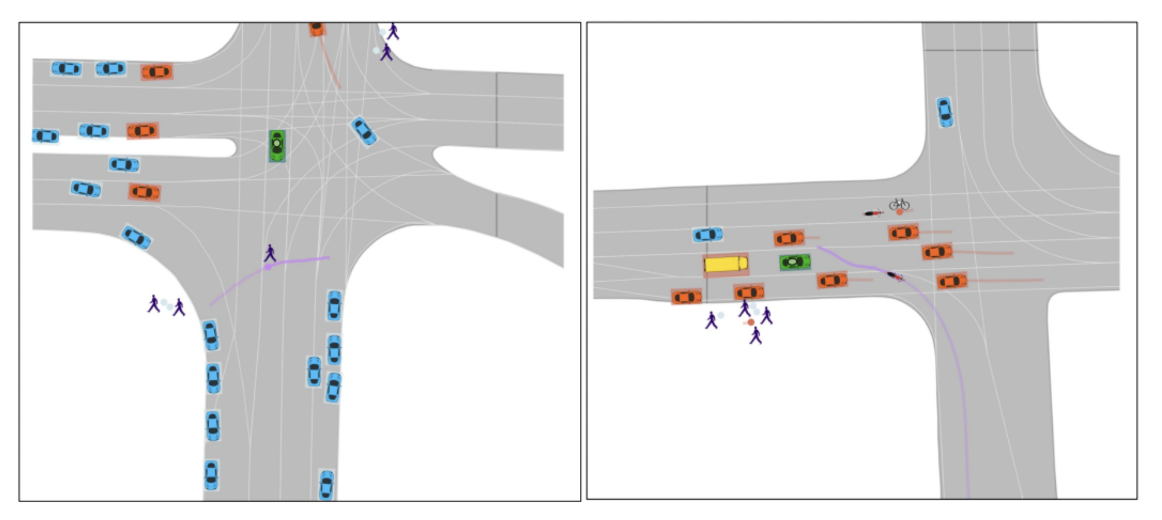
Motion forecasting, the task of predicting the location of tracked objects in the future, is an essential component of developing safe self-driving systems. To support advanced research into motion forecasting, Argoverse includes two motion forecasting datasets: the original Argoverse 1 Motion Forecasting Dataset and its successor, the Argoverse 2 Motion Forecasting Dataset, which contains longer sequences and richer object attributes.
Recent advances in machine learning have shown that surprisingly powerful representations can be learned from unannotated data. The Argoverse 2 Lidar Dataset is one of the largest lidar datasets in the autonomous driving industry, with a staggering 6 million lidar frames and 20,000 scenarios. With this dataset, researchers can advance key aspects of safe and efficient autonomous driving, from point cloud forecasting to self-supervised learning.
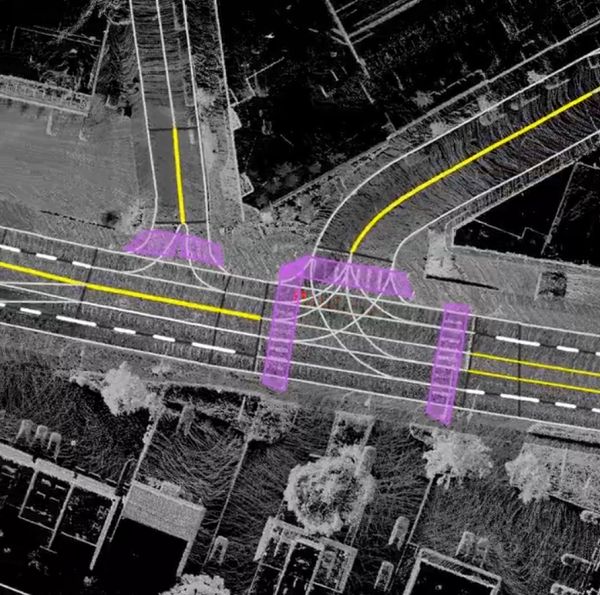
High definition (HD) maps act as a blueprint for the many fixed objects autonomous vehicles encounter on the road, from stop signs to lane boundaries. As real-world environments change, it is critical that HD maps reflect those changes in order to continuously provide the most up-to-date information to the autonomous driving system. To support the development of novel methods for detecting out-of-date map regions, Argoverse 2 includes a map change dataset.